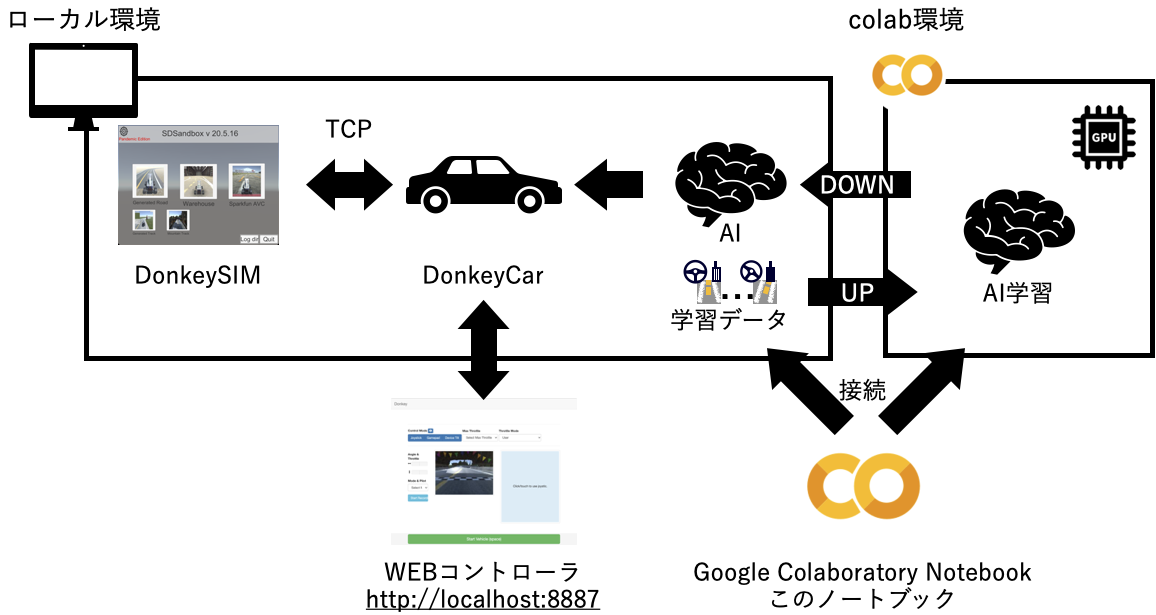
ローカルに、DonkeyCarソフトウェアのインストール
セルの実行方法はマウスでセルを選択後、表示される「三角ボタン」を押下する.
Collecting tensorflow==1.15.0
Downloading tensorflow-1.15.0-cp37-cp37m-macosx_10_11_x86_64.whl (124.0 MB)
|████████████████████████████████| 124.0 MB 46 kB/s
Collecting absl-py>=0.7.0
Downloading absl-py-0.9.0.tar.gz (104 kB)
|████████████████████████████████| 104 kB 14.7 MB/s
Collecting tensorboard<1.16.0,>=1.15.0
Downloading tensorboard-1.15.0-py3-none-any.whl (3.8 MB)
|████████████████████████████████| 3.8 MB 11.2 MB/s
Collecting numpy<2.0,>=1.16.0
Downloading numpy-1.18.5-cp37-cp37m-macosx_10_9_x86_64.whl (15.1 MB)
|████████████████████████████████| 15.1 MB 14.2 MB/s
Collecting google-pasta>=0.1.6
Downloading google_pasta-0.2.0-py3-none-any.whl (57 kB)
|████████████████████████████████| 57 kB 17.8 MB/s
Collecting gast==0.2.2
Downloading gast-0.2.2.tar.gz (10 kB)
Collecting protobuf>=3.6.1
Downloading protobuf-3.12.2-cp37-cp37m-macosx_10_9_x86_64.whl (1.3 MB)
|████████████████████████████████| 1.3 MB 36.9 MB/s
Requirement already satisfied: wheel>=0.26 in ./vdonkey/lib/python3.7/site-packages (from tensorflow==1.15.0) (0.34.2)
Collecting termcolor>=1.1.0
Downloading termcolor-1.1.0.tar.gz (3.9 kB)
Requirement already satisfied: six>=1.10.0 in ./vdonkey/lib/python3.7/site-packages (from tensorflow==1.15.0) (1.15.0)
Collecting wrapt>=1.11.1
Downloading wrapt-1.12.1.tar.gz (27 kB)
Collecting keras-applications>=1.0.8
Downloading Keras_Applications-1.0.8-py3-none-any.whl (50 kB)
|████████████████████████████████| 50 kB 14.7 MB/s
Collecting keras-preprocessing>=1.0.5
Downloading Keras_Preprocessing-1.1.2-py2.py3-none-any.whl (42 kB)
|████████████████████████████████| 42 kB 3.1 MB/s
Collecting tensorflow-estimator==1.15.1
Downloading tensorflow_estimator-1.15.1-py2.py3-none-any.whl (503 kB)
|████████████████████████████████| 503 kB 4.9 MB/s
Collecting grpcio>=1.8.6
Downloading grpcio-1.29.0-cp37-cp37m-macosx_10_9_x86_64.whl (2.8 MB)
|████████████████████████████████| 2.8 MB 14.1 MB/s
Collecting opt-einsum>=2.3.2
Downloading opt_einsum-3.2.1-py3-none-any.whl (63 kB)
|████████████████████████████████| 63 kB 5.5 MB/s
Collecting astor>=0.6.0
Downloading astor-0.8.1-py2.py3-none-any.whl (27 kB)
Requirement already satisfied: setuptools>=41.0.0 in ./vdonkey/lib/python3.7/site-packages (from tensorboard<1.16.0,>=1.15.0->tensorflow==1.15.0) (47.1.1)
Collecting markdown>=2.6.8
Downloading Markdown-3.2.2-py3-none-any.whl (88 kB)
|████████████████████████████████| 88 kB 6.5 MB/s
Collecting werkzeug>=0.11.15
Downloading Werkzeug-1.0.1-py2.py3-none-any.whl (298 kB)
|████████████████████████████████| 298 kB 16.1 MB/s
Collecting h5py
Downloading h5py-2.10.0-cp37-cp37m-macosx_10_6_intel.whl (3.0 MB)
|████████████████████████████████| 3.0 MB 35.2 MB/s
Requirement already satisfied: importlib-metadata; python_version < “3.8” in ./vdonkey/lib/python3.7/site-packages (from markdown>=2.6.8->tensorboard<1.16.0,>=1.15.0->tensorflow==1.15.0) (1.6.1)
Requirement already satisfied: zipp>=0.5 in ./vdonkey/lib/python3.7/site-packages (from importlib-metadata; python_version < “3.8”->markdown>=2.6.8->tensorboard<1.16.0,>=1.15.0->tensorflow==1.15.0) (3.1.0)
Building wheels for collected packages: absl-py, gast, termcolor, wrapt
Building wheel for absl-py (setup.py) … done
Created wheel for absl-py: filename=absl_py-0.9.0-py3-none-any.whl size=121931 sha256=0ebf2c60167c38cc1a7710fe398ffda06c5f3a90b1032e2dc8aaa04c88be8792
Stored in directory: /Users/chen/Library/Caches/pip/wheels/cc/af/1a/498a24d0730ef484019e007bb9e8cef3ac00311a672c049a3e
Building wheel for gast (setup.py) … done
Created wheel for gast: filename=gast-0.2.2-py3-none-any.whl size=7539 sha256=c0f7d62bd142cf70dd117cd53c7f3308b11d5121cd4cfadee95a109cc8ed5321
Stored in directory: /Users/chen/Library/Caches/pip/wheels/21/7f/02/420f32a803f7d0967b48dd823da3f558c5166991bfd204eef3
Building wheel for termcolor (setup.py) … done
Created wheel for termcolor: filename=termcolor-1.1.0-py3-none-any.whl size=4830 sha256=eae29569bece02a05534429923481614d786046411c02e3373bfa36cb4e00280
Stored in directory: /Users/chen/Library/Caches/pip/wheels/3f/e3/ec/8a8336ff196023622fbcb36de0c5a5c218cbb24111d1d4c7f2
Building wheel for wrapt (setup.py) … done
Created wheel for wrapt: filename=wrapt-1.12.1-cp37-cp37m-macosx_10_15_x86_64.whl size=32491 sha256=265f5a417eead6aecae94efc221bcd0b3514095f46b592f459f3be28ea8242ea
Stored in directory: /Users/chen/Library/Caches/pip/wheels/62/76/4c/aa25851149f3f6d9785f6c869387ad82b3fd37582fa8147ac6
Successfully built absl-py gast termcolor wrapt
Installing collected packages: absl-py, protobuf, grpcio, markdown, numpy, werkzeug, tensorboard, google-pasta, gast, termcolor, wrapt, h5py, keras-applications, keras-preprocessing, tensorflow-estimator, opt-einsum, astor, tensorflow
Successfully installed absl-py-0.9.0 astor-0.8.1 gast-0.2.2 google-pasta-0.2.0 grpcio-1.29.0 h5py-2.10.0 keras-applications-1.0.8 keras-preprocessing-1.1.2 markdown-3.2.2 numpy-1.18.5 opt-einsum-3.2.1 protobuf-3.12.2 tensorboard-1.15.0 tensorflow-1.15.0 tensorflow-estimator-1.15.1 termcolor-1.1.0 werkzeug-1.0.1 wrapt-1.12.1
Cloning into ‘donkeycar’…
remote: Enumerating objects: 13118, done.
remote: Total 13118 (delta 0), reused 0 (delta 0), pack-reused 13118
Receiving objects: 100% (13118/13118), 67.77 MiB | 6.81 MiB/s, done.
Resolving deltas: 100% (8296/8296), done.
/Users/chen/workspace/donkeycar
Branch ‘master’ set up to track remote branch ‘master’ from ‘origin’.
Switched to a new branch ‘master’
Obtaining file:///Users/chen/workspace/donkeycar
Requirement already satisfied: numpy in /Users/chen/workspace/vdonkey/lib/python3.7/site-packages (from donkeycar==3.1.2) (1.18.5)
Collecting pillow
Downloading Pillow-7.1.2-cp37-cp37m-macosx_10_10_x86_64.whl (2.2 MB)
|████████████████████████████████| 2.2 MB 3.0 MB/s
Collecting docopt
Downloading docopt-0.6.2.tar.gz (25 kB)
Requirement already satisfied: tornado in /Users/chen/workspace/vdonkey/lib/python3.7/site-packages (from donkeycar==3.1.2) (6.0.4)
Collecting requests
Downloading requests-2.23.0-py2.py3-none-any.whl (58 kB)
|████████████████████████████████| 58 kB 14.6 MB/s
Requirement already satisfied: h5py in /Users/chen/workspace/vdonkey/lib/python3.7/site-packages (from donkeycar==3.1.2) (2.10.0)
Collecting moviepy
Downloading moviepy-1.0.3.tar.gz (388 kB)
|████████████████████████████████| 388 kB 40.4 MB/s
Collecting pandas
Downloading pandas-1.0.4-cp37-cp37m-macosx_10_9_x86_64.whl (10.0 MB)
|████████████████████████████████| 10.0 MB 8.7 MB/s
Collecting PrettyTable
Downloading prettytable-0.7.2.tar.bz2 (21 kB)
Collecting paho-mqtt
Downloading paho-mqtt-1.5.0.tar.gz (99 kB)
|████████████████████████████████| 99 kB 11.4 MB/s
Collecting matplotlib
Downloading matplotlib-3.2.1-cp37-cp37m-macosx_10_9_x86_64.whl (12.4 MB)
|████████████████████████████████| 12.4 MB 9.7 MB/s
Collecting idna<3,>=2.5
Downloading idna-2.9-py2.py3-none-any.whl (58 kB)
|████████████████████████████████| 58 kB 10.5 MB/s
Collecting urllib3!=1.25.0,!=1.25.1,<1.26,>=1.21.1
Downloading urllib3-1.25.9-py2.py3-none-any.whl (126 kB)
|████████████████████████████████| 126 kB 34.4 MB/s
Collecting certifi>=2017.4.17
Downloading certifi-2020.4.5.2-py2.py3-none-any.whl (157 kB)
|████████████████████████████████| 157 kB 9.7 MB/s
Collecting chardet<4,>=3.0.2
Downloading chardet-3.0.4-py2.py3-none-any.whl (133 kB)
|████████████████████████████████| 133 kB 5.5 MB/s
Requirement already satisfied: six in /Users/chen/workspace/vdonkey/lib/python3.7/site-packages (from h5py->donkeycar==3.1.2) (1.15.0)
Requirement already satisfied: decorator<5.0,>=4.0.2 in /Users/chen/workspace/vdonkey/lib/python3.7/site-packages (from moviepy->donkeycar==3.1.2) (4.4.2)
Collecting tqdm<5.0,>=4.11.2
Downloading tqdm-4.46.1-py2.py3-none-any.whl (63 kB)
|████████████████████████████████| 63 kB 4.0 MB/s
Collecting proglog<=1.0.0
Downloading proglog-0.1.9.tar.gz (10 kB)
Collecting imageio<3.0,>=2.5
Downloading imageio-2.8.0-py3-none-any.whl (3.3 MB)
|████████████████████████████████| 3.3 MB 2.2 MB/s
Collecting imageio_ffmpeg>=0.2.0
Downloading imageio_ffmpeg-0.4.2-py3-none-macosx_10_9_intel.macosx_10_9_x86_64.macosx_10_10_intel.macosx_10_10_x86_64.whl (22.5 MB)
|████████████████████████████████| 22.5 MB 8.4 MB/s
Collecting pytz>=2017.2
Downloading pytz-2020.1-py2.py3-none-any.whl (510 kB)
|████████████████████████████████| 510 kB 7.2 MB/s
Requirement already satisfied: python-dateutil>=2.6.1 in /Users/chen/workspace/vdonkey/lib/python3.7/site-packages (from pandas->donkeycar==3.1.2) (2.8.1)
Requirement already satisfied: pyparsing!=2.0.4,!=2.1.2,!=2.1.6,>=2.0.1 in /Users/chen/workspace/vdonkey/lib/python3.7/site-packages (from matplotlib->donkeycar==3.1.2) (2.4.7)
Collecting cycler>=0.10
Downloading cycler-0.10.0-py2.py3-none-any.whl (6.5 kB)
Collecting kiwisolver>=1.0.1
Downloading kiwisolver-1.2.0-cp37-cp37m-macosx_10_9_x86_64.whl (60 kB)
|████████████████████████████████| 60 kB 11.5 MB/s
Building wheels for collected packages: docopt, moviepy, PrettyTable, paho-mqtt, proglog
Building wheel for docopt (setup.py) … done
Created wheel for docopt: filename=docopt-0.6.2-py2.py3-none-any.whl size=13704 sha256=1ed8fcb85a9ec872c113c6977422bdf9f2708419501cf184e5206d2eea36f663
Stored in directory: /Users/chen/Library/Caches/pip/wheels/72/b0/3f/1d95f96ff986c7dfffe46ce2be4062f38ebd04b506c77c81b9
Building wheel for moviepy (setup.py) … done
Created wheel for moviepy: filename=moviepy-1.0.3-py3-none-any.whl size=110727 sha256=c841358abb362d7d6f4fb5f5fc27014c495d20d374e97278b38053602933ff7f
Stored in directory: /Users/chen/Library/Caches/pip/wheels/56/dc/2b/9cd600d483c04af3353d66623056fc03faed76b7518faae4df
Building wheel for PrettyTable (setup.py) … done
Created wheel for PrettyTable: filename=prettytable-0.7.2-py3-none-any.whl size=13698 sha256=7a707229ae28bad4daf980fb0ecf36af8959d4c33d85eec4d066eaa44c293a44
Stored in directory: /Users/chen/Library/Caches/pip/wheels/8c/76/0b/eb9eb3da7e2335e3577e3f96a0ae9f74f206e26457bd1a2bc8
Building wheel for paho-mqtt (setup.py) … done
Created wheel for paho-mqtt: filename=paho_mqtt-1.5.0-py3-none-any.whl size=61415 sha256=d6c6b029c64bee8cf5cb83df8de4b483ccc865f2685ebe190bf69d4de436bbe5
Stored in directory: /Users/chen/Library/Caches/pip/wheels/0d/7c/fb/05123381bd60c57ffcdc6fcc1c26e585dedee85b8c1625e2c1
Building wheel for proglog (setup.py) … done
Created wheel for proglog: filename=proglog-0.1.9-py3-none-any.whl size=6146 sha256=e88b5e1b73a9ff77c324a69ce340bd15584c2eb126bc68073438eec518d13b1c
Stored in directory: /Users/chen/Library/Caches/pip/wheels/12/36/1f/dc61e6ac10781d63cf6fa045eb09fa613a667384e12cb6e6e0
Successfully built docopt moviepy PrettyTable paho-mqtt proglog
Installing collected packages: pillow, docopt, idna, urllib3, certifi, chardet, requests, tqdm, proglog, imageio, imageio-ffmpeg, moviepy, pytz, pandas, PrettyTable, paho-mqtt, cycler, kiwisolver, matplotlib, donkeycar
Running setup.py develop for donkeycar
Successfully installed PrettyTable-0.7.2 certifi-2020.4.5.2 chardet-3.0.4 cycler-0.10.0 docopt-0.6.2 donkeycar idna-2.9 imageio-2.8.0 imageio-ffmpeg-0.4.2 kiwisolver-1.2.0 matplotlib-3.2.1 moviepy-1.0.3 paho-mqtt-1.5.0 pandas-1.0.4 pillow-7.1.2 proglog-0.1.9 pytz-2020.1 requests-2.23.0 tqdm-4.46.1 urllib3-1.25.9
ERROR: gym-donkeycar is not a valid editable requirement. It should either be a path to a local project or a VCS URL (beginning with svn+, git+, hg+, or bzr+).
/Users/chen/workspace
Collecting gym
Downloading gym-0.17.2.tar.gz (1.6 MB)
|████████████████████████████████| 1.6 MB 2.9 MB/s
Collecting scipy
Downloading scipy-1.4.1-cp37-cp37m-macosx_10_6_intel.whl (28.4 MB)
|████████████████████████████████| 28.4 MB 5.6 MB/s
Requirement already satisfied: numpy>=1.10.4 in ./vdonkey/lib/python3.7/site-packages (from gym) (1.18.5)
Collecting pyglet<=1.5.0,>=1.4.0
Downloading pyglet-1.5.0-py2.py3-none-any.whl (1.0 MB)
|████████████████████████████████| 1.0 MB 6.8 MB/s
Collecting cloudpickle<1.4.0,>=1.2.0
Downloading cloudpickle-1.3.0-py2.py3-none-any.whl (26 kB)
Collecting future
Downloading future-0.18.2.tar.gz (829 kB)
|████████████████████████████████| 829 kB 5.0 MB/s
Building wheels for collected packages: gym, future
Building wheel for gym (setup.py) … done
Created wheel for gym: filename=gym-0.17.2-py3-none-any.whl size=1650891 sha256=681ab556d738088cd196205a956372aa5d866ad3f8addd5e21c0bf10064a1a9e
Stored in directory: /Users/chen/Library/Caches/pip/wheels/18/e1/58/89a2aa24e6c2cc800204fc02010612afdf200926c4d6bfe315
Building wheel for future (setup.py) … done
Created wheel for future: filename=future-0.18.2-py3-none-any.whl size=491058 sha256=993d38b324ae7137487f75a01b07d6c71a28e086ede9ca0920cb17b3e327e924
Stored in directory: /Users/chen/Library/Caches/pip/wheels/56/b0/fe/4410d17b32f1f0c3cf54cdfb2bc04d7b4b8f4ae377e2229ba0
Successfully built gym future
Installing collected packages: scipy, future, pyglet, cloudpickle, gym
Successfully installed cloudpickle-1.3.0 future-0.18.2 gym-0.17.2 pyglet-1.5.0 scipy-1.4.1
Cloning into ‘gym-donkeycar’…
remote: Enumerating objects: 773, done.
remote: Total 773 (delta 0), reused 0 (delta 0), pack-reused 773
Receiving objects: 100% (773/773), 2.94 MiB | 2.60 MiB/s, done.
Resolving deltas: 100% (430/430), done.
Obtaining file:///Users/chen/workspace/gym-donkeycar
Requirement already satisfied: gym in ./vdonkey/lib/python3.7/site-packages (from gym-donkeycar==1.0.14) (0.17.2)
Requirement already satisfied: numpy in ./vdonkey/lib/python3.7/site-packages (from gym-donkeycar==1.0.14) (1.18.5)
Requirement already satisfied: pillow in ./vdonkey/lib/python3.7/site-packages (from gym-donkeycar==1.0.14) (7.1.2)
Collecting pytest
Downloading pytest-5.4.3-py3-none-any.whl (248 kB)
|████████████████████████████████| 248 kB 3.5 MB/s
Collecting pytest-mock
Downloading pytest_mock-3.1.1-py3-none-any.whl (10 kB)
Requirement already satisfied: cloudpickle<1.4.0,>=1.2.0 in ./vdonkey/lib/python3.7/site-packages (from gym->gym-donkeycar==1.0.14) (1.3.0)
Requirement already satisfied: scipy in ./vdonkey/lib/python3.7/site-packages (from gym->gym-donkeycar==1.0.14) (1.4.1)
Requirement already satisfied: pyglet<=1.5.0,>=1.4.0 in ./vdonkey/lib/python3.7/site-packages (from gym->gym-donkeycar==1.0.14) (1.5.0)
Collecting more-itertools>=4.0.0
Downloading more_itertools-8.4.0-py3-none-any.whl (43 kB)
|████████████████████████████████| 43 kB 3.4 MB/s
Requirement already satisfied: attrs>=17.4.0 in ./vdonkey/lib/python3.7/site-packages (from pytest->gym-donkeycar==1.0.14) (19.3.0)
Requirement already satisfied: importlib-metadata>=0.12; python_version < “3.8” in ./vdonkey/lib/python3.7/site-packages (from pytest->gym-donkeycar==1.0.14) (1.6.1)
Collecting pluggy<1.0,>=0.12
Downloading pluggy-0.13.1-py2.py3-none-any.whl (18 kB)
Collecting py>=1.5.0
Downloading py-1.8.2-py2.py3-none-any.whl (83 kB)
|████████████████████████████████| 83 kB 5.0 MB/s
Requirement already satisfied: packaging in ./vdonkey/lib/python3.7/site-packages (from pytest->gym-donkeycar==1.0.14) (20.4)
Requirement already satisfied: wcwidth in ./vdonkey/lib/python3.7/site-packages (from pytest->gym-donkeycar==1.0.14) (0.2.4)
Requirement already satisfied: future in ./vdonkey/lib/python3.7/site-packages (from pyglet<=1.5.0,>=1.4.0->gym->gym-donkeycar==1.0.14) (0.18.2)
Requirement already satisfied: zipp>=0.5 in ./vdonkey/lib/python3.7/site-packages (from importlib-metadata>=0.12; python_version < “3.8”->pytest->gym-donkeycar==1.0.14) (3.1.0)
Requirement already satisfied: pyparsing>=2.0.2 in ./vdonkey/lib/python3.7/site-packages (from packaging->pytest->gym-donkeycar==1.0.14) (2.4.7)
Requirement already satisfied: six in ./vdonkey/lib/python3.7/site-packages (from packaging->pytest->gym-donkeycar==1.0.14) (1.15.0)
Installing collected packages: more-itertools, pluggy, py, pytest, pytest-mock, gym-donkeycar
Running setup.py develop for gym-donkeycar
Successfully installed gym-donkeycar more-itertools-8.4.0 pluggy-0.13.1 py-1.8.2 pytest-5.4.3 pytest-mock-3.1.1